



Position misalignment
Eine Ursache für den Positionsversatz von Robotern kann zum einen durch eine veränderte Kalibrierung (Nullpunkt) des ausgetauschten oder reparierten Roboters, zum anderen durch eine Verschiebung
Vehicle coordinate system
Between the driver and passenger is the origin of the vehicle’s component coordinate system. The X-axis points in the direction of travel, the Y-axis from
Model-based approach
Es wird ein mathematisches Modell mit unbekannten Modellparametern aufgestellt. Die reale Roboterkinematik wird z.B. mit der Messsensorik LaserLAB von WIEST vermessen und über ein nichtlineares

Theoretical Basics – Kinematic Calibration of Industrial Robots
Although off-line programming technology is well advanced, approximately 95% of all industrial robots are currently programmed using the teach-in method. This is mainly due
Robot cloning
Robot cloning is the recovery or reproduction of a robot installation. Avoiding manual tracking of robot programmes and exploiting synergy effects are the goals
Measurement in workpiece coordinate systems
Sowohl beim manuellen Teachen als auch bei der Offline-Programmierung von Roboterprogrammen werden alle Arbeitspunkte des Roboters relativ zum Bauteilkoordinatensystem gespeichert. Der Vorteil dieser Vorgehensweise ist,
Maintenance
The task is to keep a production line running with as little costly downtime as possible. Maintenance work after a crash, or the replacement of
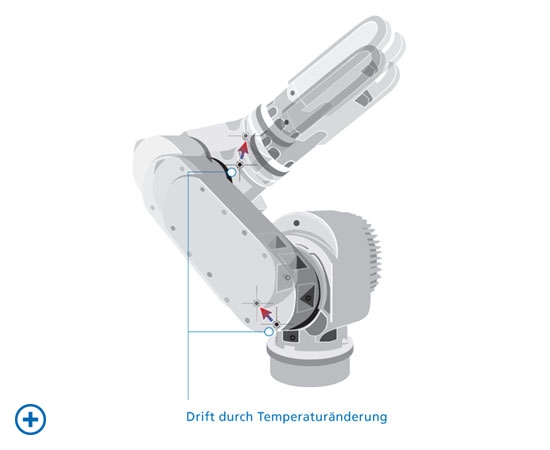
Temperature compensation
For special robot applications, such as honing bores or continuous quality monitoring using flexible in-line measurement technology, it is important that the kinematics of the robot remain constant over a long period of time – months or years.