



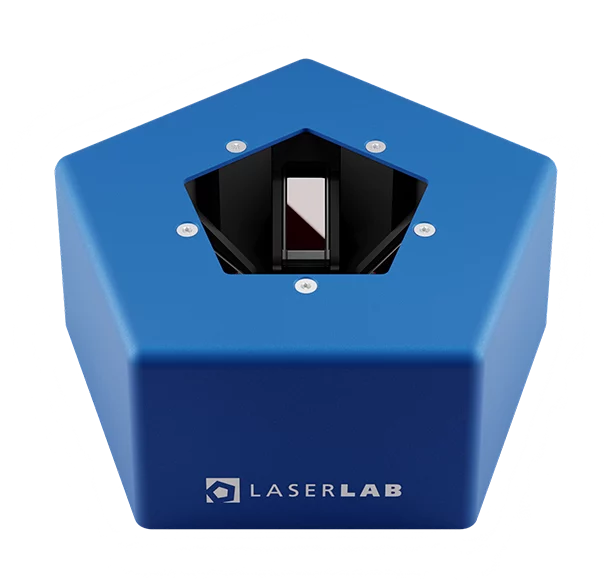

The aim of the survey is to determine the tool center point (TCP). You get the actual geometric dimensions of the tool in relation to the flange coordinate system, in 3, 5 and 6 dimensions.

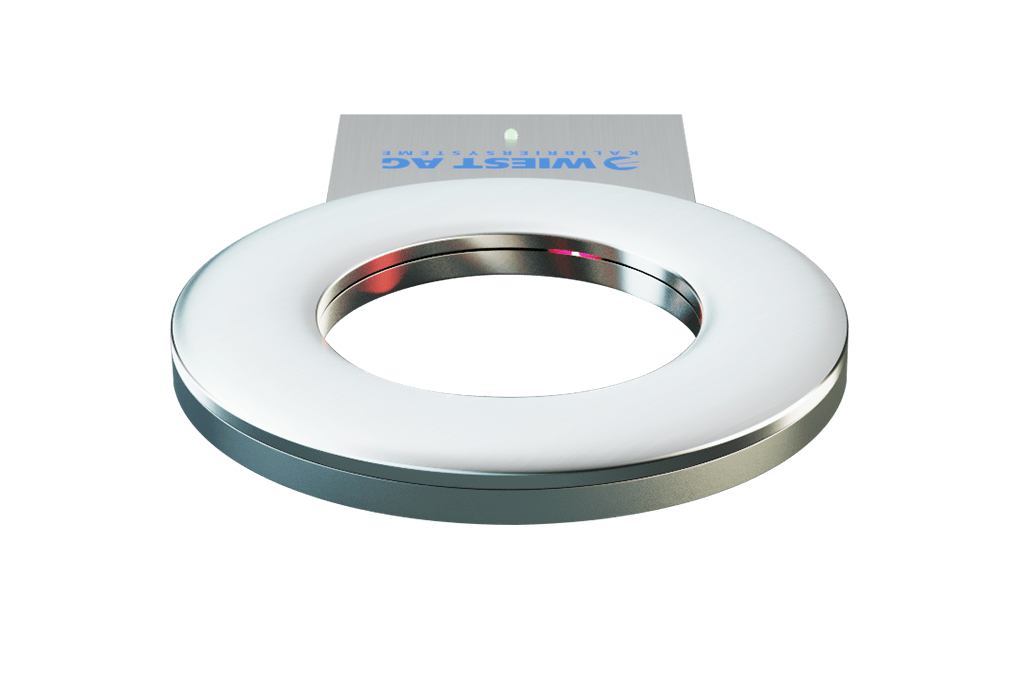
The goal is to determine the transformation from the workpiece to the robot's coordinate system. The software measures fixtures, stations or external stationary tools. High-precision, contactless and automatic.

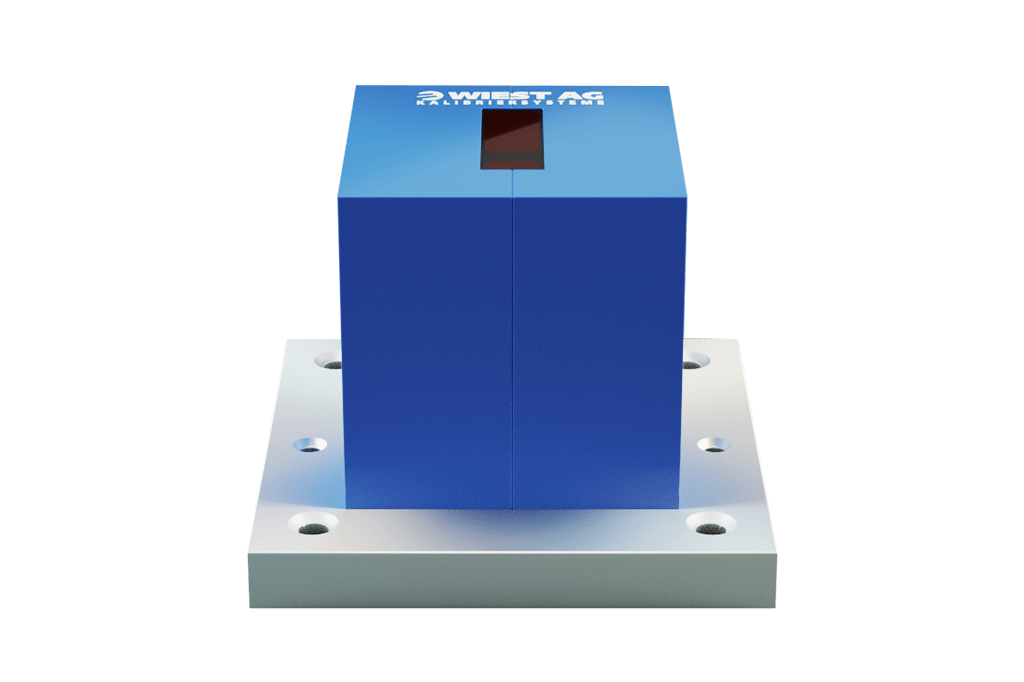
The aim is to measure, optimize and reference the absolute positioning accuracy using the "closed-loop method". You get an accurate model of the robot axes. Suitable for optimization and recovery.

The goal is to measure 1- to 5-axis positioners, rotary tables, rotary tilting tables, additional axes or synchronized, coupled, cooperating robots. You get a coordinate system in which the kinematics move.
