



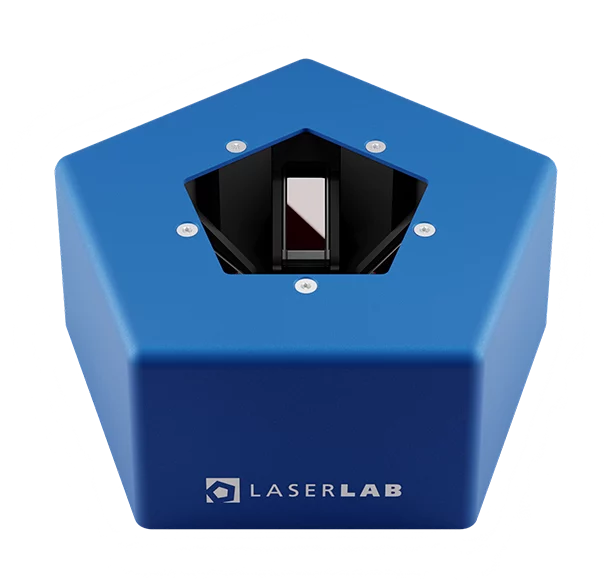

Ziel der Vermessung ist die Bestimmung des Tool Center Point. Sie erhalten die realen geometrischen Maße des Werkzeugs bezüglich des Flanschkoordinatensystems, und zwar sowohl in 3,5 als auch in 6 Dimensionen.

Ziel ist die Bestimmung der Transformation vom Werkstück in das Koordinatensystem des Roboters. Die Software vermisst Vorrichtungen, Stationen oder externe, stationäre Werkzeuge. Hochpräzise, berührungslos und automatisch.

Ziel ist die Vermessung, Optimierung und Referenzierung der absoluten Positioniergenauigkeit nach dem „closed-loop-Verfahren“. Sie erhalten ein genaues Modell der Roboterachsen. Geeignet für Optimierung und Wiederherstellung.

Ziel ist die Vermessung von 1- bis 5-Achspositionierern, Drehtischen, Drehkipptischen, Zusatzachsen oder synchronisierter, gekoppelter, kooperierender Roboter. Sie erhalten ein Koordinatensystem, in dem sich die Kinematiken bewegen.
