Complete 6D measurement of a gripper/part in less than 60 seconds
Fully integrated in the cell and under robot programme control
Automatic transfer of the correction values
Allows gripper measurement without the need for probes or other tools
Data communication via Profinet, Profibus, Ethernet or RS232

Fast and efficient recovery of gripper positions on all stations

Calibration accuracy better than 0.2 mm

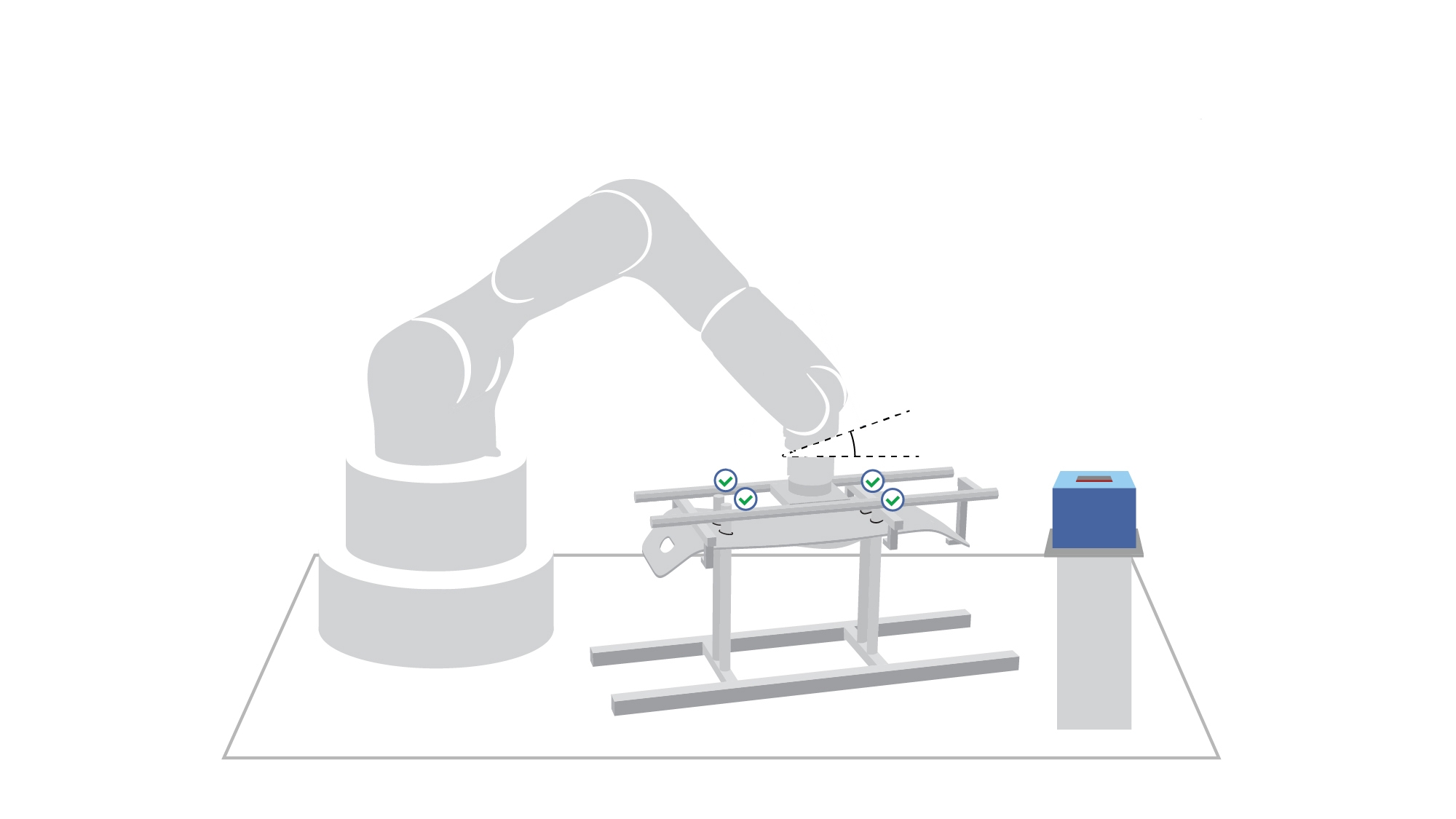
Complete failure chain from flange to component captured in one step

TCP correction (in 6 dimensions) in the robot controller

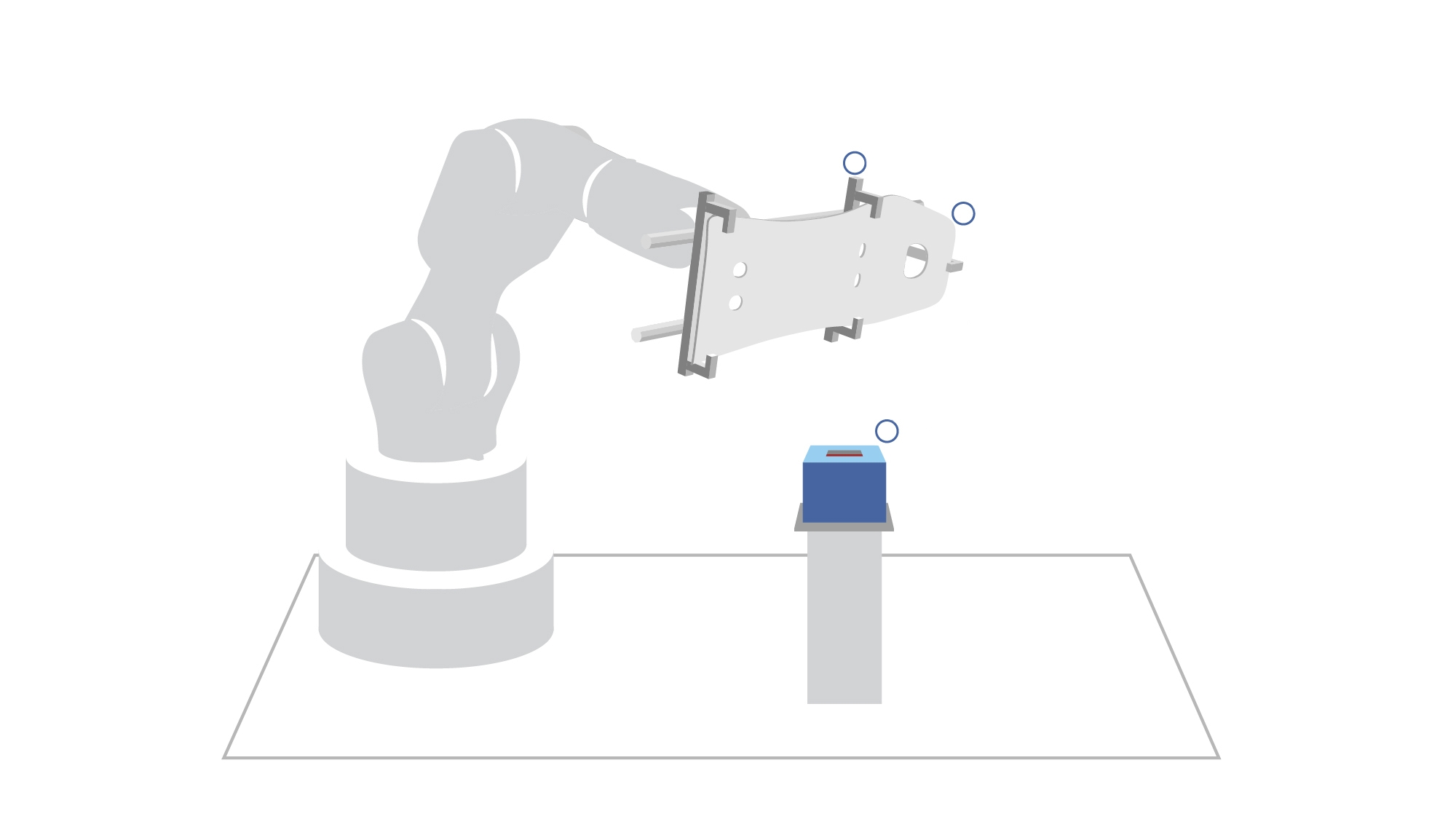
Initial situation
The initial commissioning of GripLAB after installation in the robot cell involves a simple motion programme with nine measuring points.
Inspection
After a crash, the test shows that the gripper is misaligned. No additional software installation on the robot controller is required.
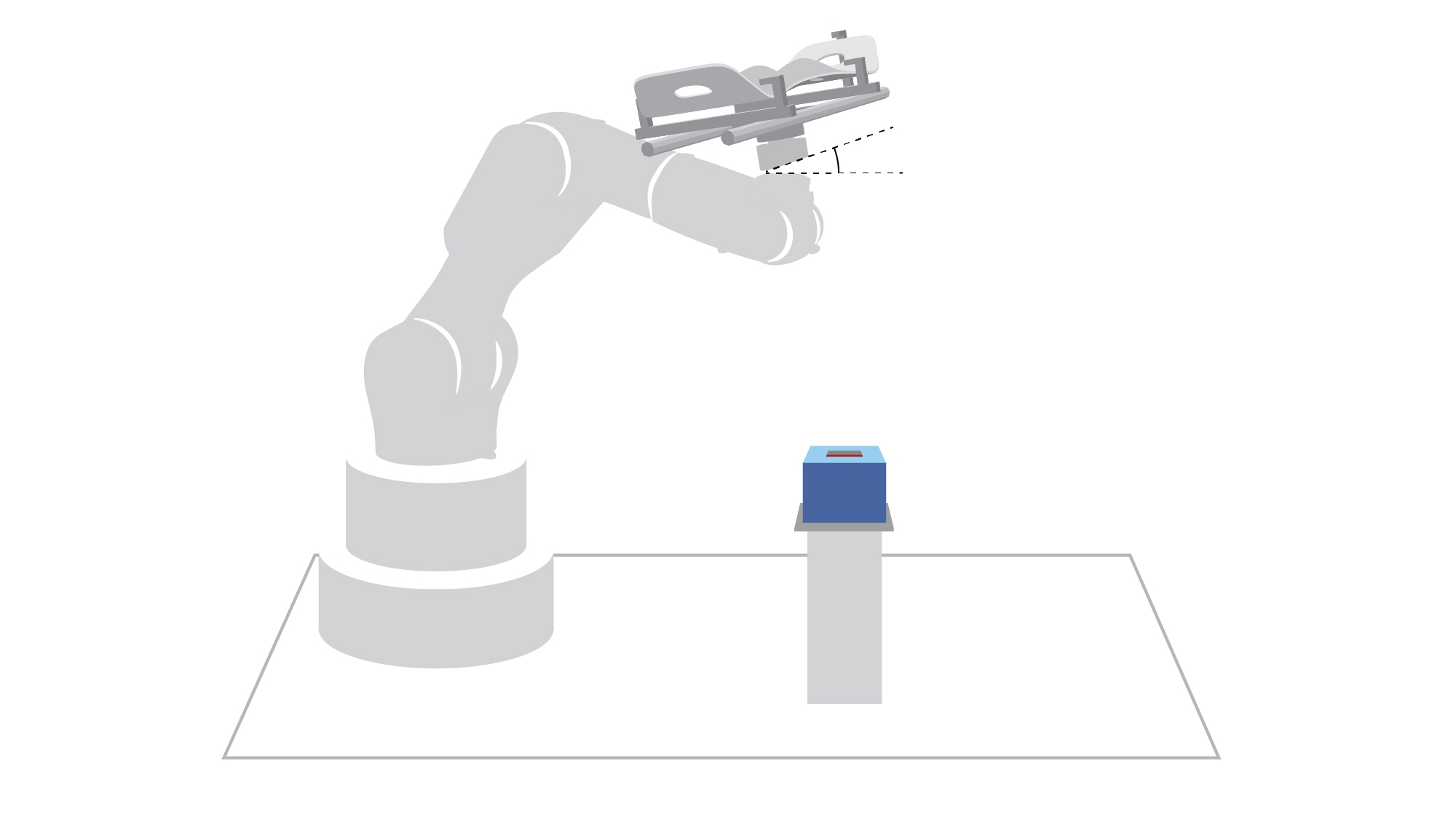
Measurement
Automatic measuring of the gripper is done by running the moving programme.
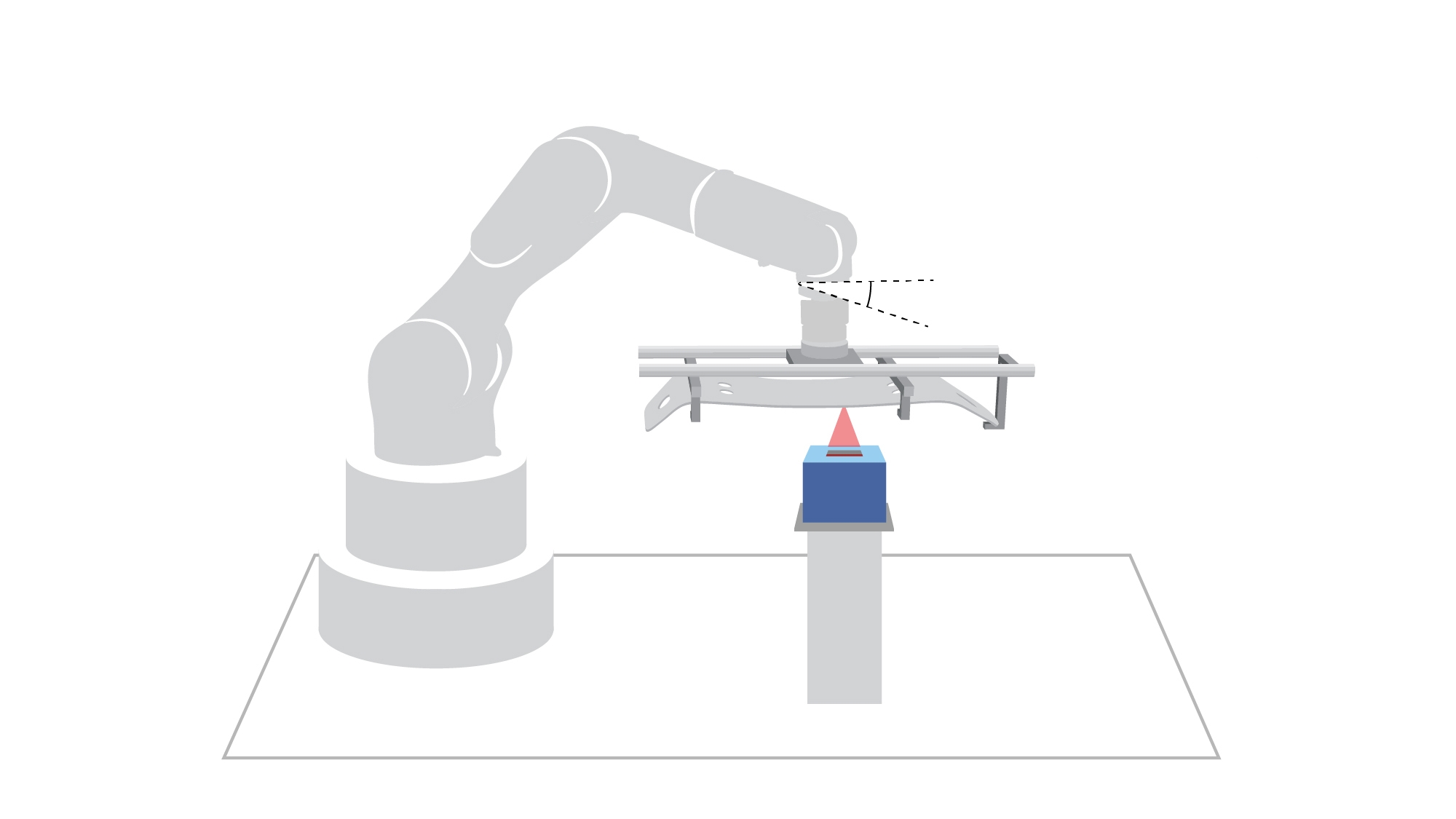
Calibration
Calibration of the gripped part. After automatic transfer of the corrected tool data, the gripping process is precise again.