Since there is no longer a serial interface on the KRC4 controllers, there was previously only a software solution for communication with our RotoLAB.
Since there is no longer a serial interface on the KRC4 controllers, there was previously only a software solution for communication with our RotoLAB.
The program RL_Babel.exe had to be installed on the KRC4 and then handled the communication between the basic system (KRL program) and a USB serial adapter on the Windows side.
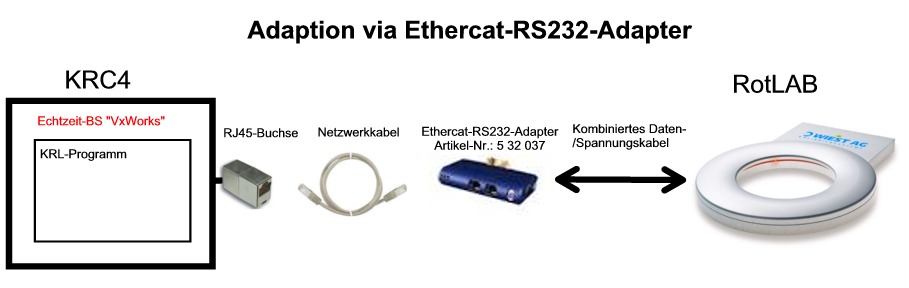
In addition to this very cost-effective variant, there is now a hardware solution that is based on the EtherCat interface from Kuka.There are currently two variants for communication with our TCP measurement system RotoLAB and the KRC4 controller from Kuka:
-
SW solution: The converter programme RL-Babel.exe and the driver for a USB-serial adapter are installed on the controller.
-
HW solution: Our EtherCat serial adapter (item no.: 5 32 037) is connected to the EtherCat interface via network cable. The adapter is pre-configured and is delivered with corresponding robot programmes. Installation on the KRC4 is no longer necessary.