Um offline generierte Roboterprogramme nicht nachteachen zu müssen ist eine absolutgenaue Vermessung der Roboter und die präzise Ermittlung von Tool- und Framedaten notwendig.
Wiest Vorteile
Nutzen für den Kunden
Die Nachteachzeit der offline generierten Programme wurde minimiert. Das Ziel einer sehr kurzen Inbetriebnahmezeit konnte ebenfalls erreicht werden.
Zusätzlich wurde durch die Vermessung festgestellt, dass die Schaltschränke der beiden Roboter vertauscht waren und somit die Masterdaten der beiden Roboter falsch waren. Ein fataler Fehler, der ohne Vermessung nicht entdeckt worden wäre. In Zukunft können die Roboter jederzeit automatisch gemastert werden.
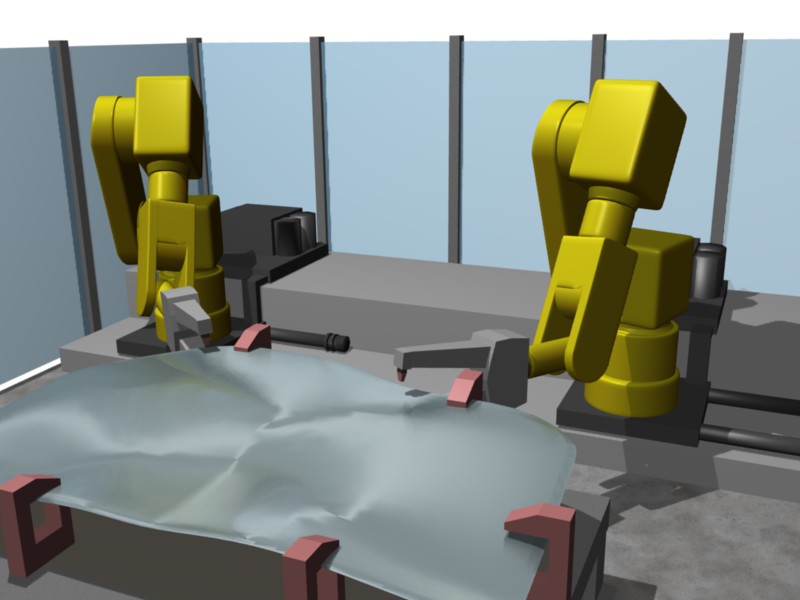
In der Fertigungslinie werden zwei Fanuc R2000iB/165 auf einer Linearachse zum Punktschweißen eingesetzt. Die Zelle verfügt zusätzlich über einen Zangenbahnhof, um Werkzeugwechsel durchführen zu können. In der Anlage werden Karosserieblechteile vom Roboter zusammengefügt und verschweißt. Die Zelle selbst ist universell aufgebaut, um in Zukunft durch Austausch der Vorrichtungen und Einspielen neuer, offline generierter Roboterprogramme eine Vielzahl unterschiedlicher Teile fertigen zu können.
Aufgabenstellung
In der Weihnachtszeit sollte die Zelle zur Automatisierung von Handarbeitsplätzen eingesetzt werden. Da für die gesamte Inbetriebnahme nur zwei Wochen zur Verfügung standen, musste die Zelle vorab offline programmiert werden, um einen direkten Übergang in die Produktion zu ermöglichen. Um möglichst wenige der offline erstellten Programme nachteachen zu müssen, war einerseits die absolutgenaue Vermessung der Roboter und andererseits die exakte Ermittlung der Tool- und Framedaten notwendig.
Umsetzung
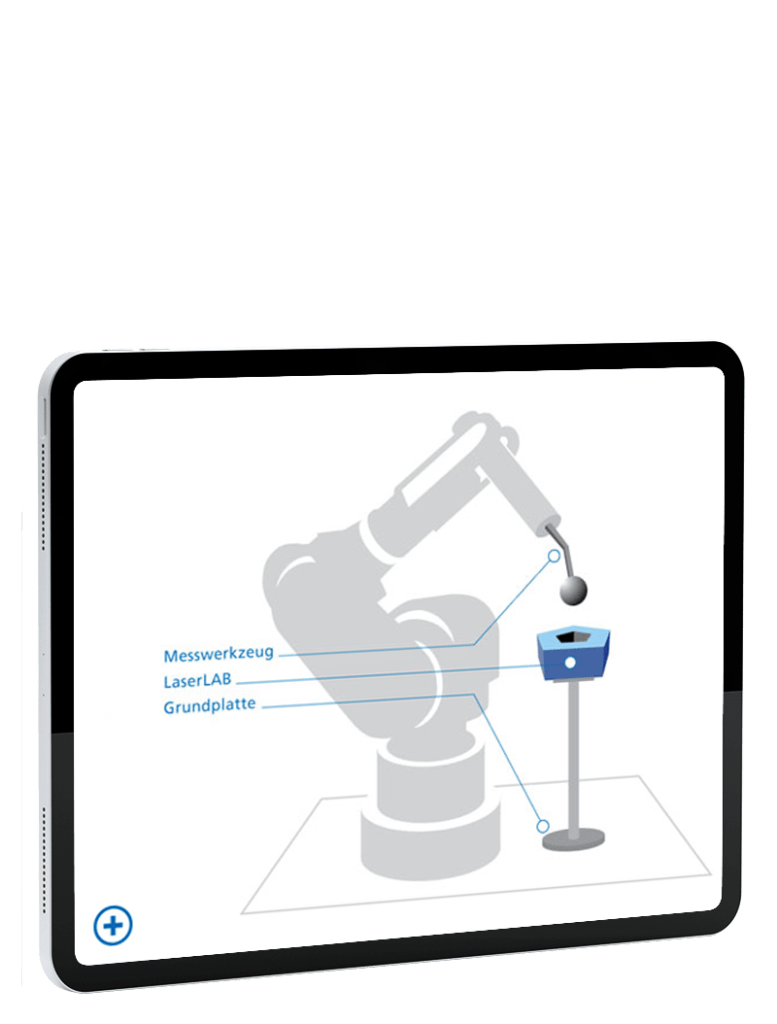
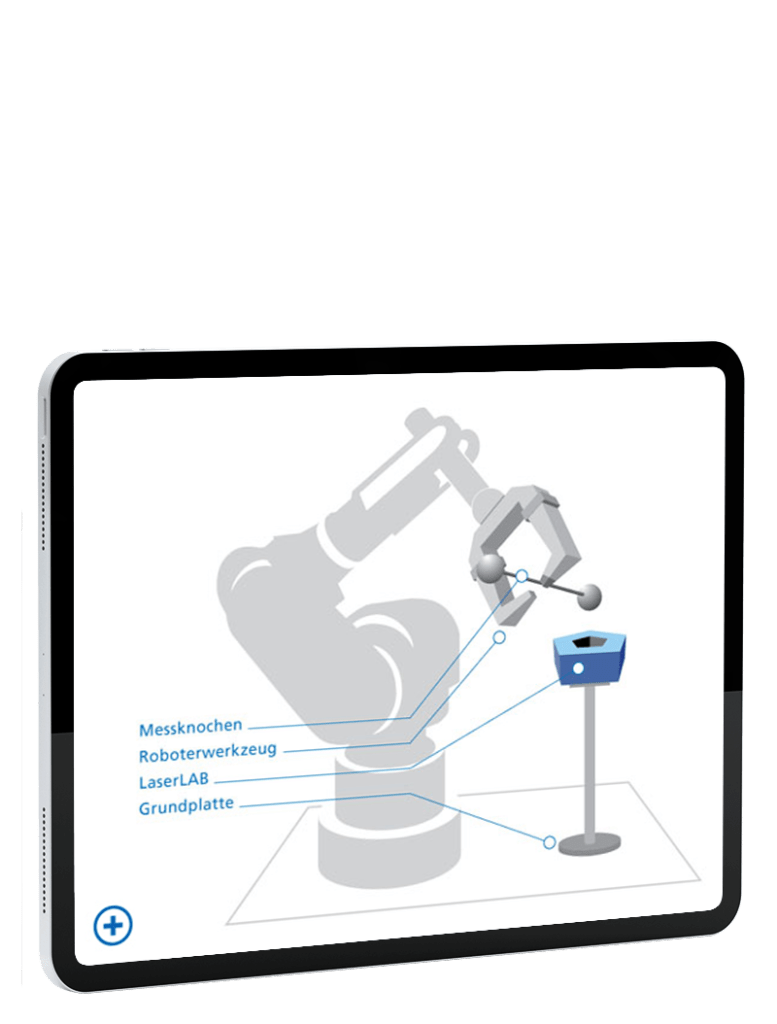
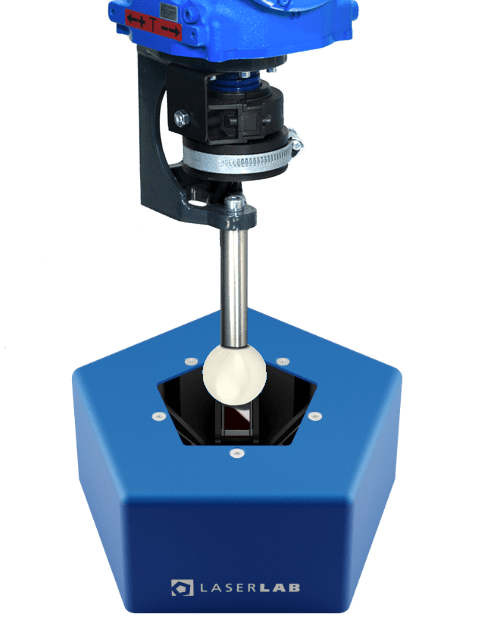
Der Roboter sowie die Linearachse wurden mit der Software loop:in absolutgenau vermessen. Für die restliche Vermessung der Zelle wurde ein universelles Masterteil angefertigt, das von jeder Vorrichtung aufgenommen werden kann. Die Positionen der Kugeln wurden mit einem FARO-Messarm in Bezug auf das Fahrzeug-NULL-Koordinatensystem vermessen. Diese Daten wurden nun von LaserLAB und tool:in verwendet, um die Transformation der Vorrichtung (Fahrzeug-Null) und des Roboter/Linearachsensystems zu bestimmen.
Produkte
Diese Wiest Produkte wurden verwendet:
loop:in
Kalibrieren Sie Ihren Roboter
für höchste Präzision