Probleme, die durch den Austausch einer Sprühlanze entstehen, entfallen vollständig, da nur die drei Tools neu vermessen werden müssen. Dies dauert nur 20 bis 30 Minuten.
Weiterhin wurden die Roboter mit loop:in absolutgenau vermessen. Dadurch hat der Kunde die Möglichkeit, offline zu programmieren.
Die Probleme, die in der Vergangenheit mit den alten KR6-Robotern auftraten, sind endgültig beseitigt. Nachdem ein Punktversatz diagnostiziert wurde, wird der Roboter mit loop:in vermessen und anschließend die Werkzeuge mit tool:in. Damit ist ein Punktversatz ausgeschlossen.
Offline Programmierung möglich
Ein Punktversatz wird ausgeschlossen
Absolutgenaues Vermessen durch loop:in
Keine Probleme mit alten KR6-Robotern
Case
Anlagenbeschreibung
Der Kunde hat in seiner Lackiererei eine Fertigungslinie, in der PVC als Unterbodenschutz auf den Unterboden der Karosserie aufgetragen wird. In der Linie befinden sich 12 KUKA KR16-Roboter auf Linearachsen, die mit SCA Schuker-Sprühlanzen mit jeweils drei Düsen ausgestattet sind. In der Nahtabdichtungslinie stehen vier alte Kuka KR 6 Roboter, die nur über Nonius justiert werden können.
Aufgabenstellung
Die Sprühlanzen sind Verschleißteile, die in unregelmäßigen Abständen ausgetauscht werden. Durch den Werkzeugwechsel stimmen die Roboterprogramme nicht mehr genau und müssen neu eingelernt werden.
Außerdem will der Kunde die Roboter in Zukunft vermehrt offline programmieren und benötigt dafür absolut genaue Roboter. Die vorhandenen Roboter können jedoch aufgrund ihres Alters vom Hersteller nicht mehr absolutgenau vermessen werden.
Umsetzung
Zur Vermessung der Düsen wurde das Messdreieck verwendet. Mit einer entsprechenden Adaption wurde es anstelle der Düse mit zwei Schrauben an der Lanze befestigt. Das Messdreieck hat den Vorteil, dass nicht nur die Stoßrichtung des Werkzeugs bzw. die Strahlrichtung des PVCs bestimmt werden kann, sondern auch die X-Richtung des Werkzeugs, die beim Flatstream im Gegensatz zum Rundstrahl eine Rolle spielt.
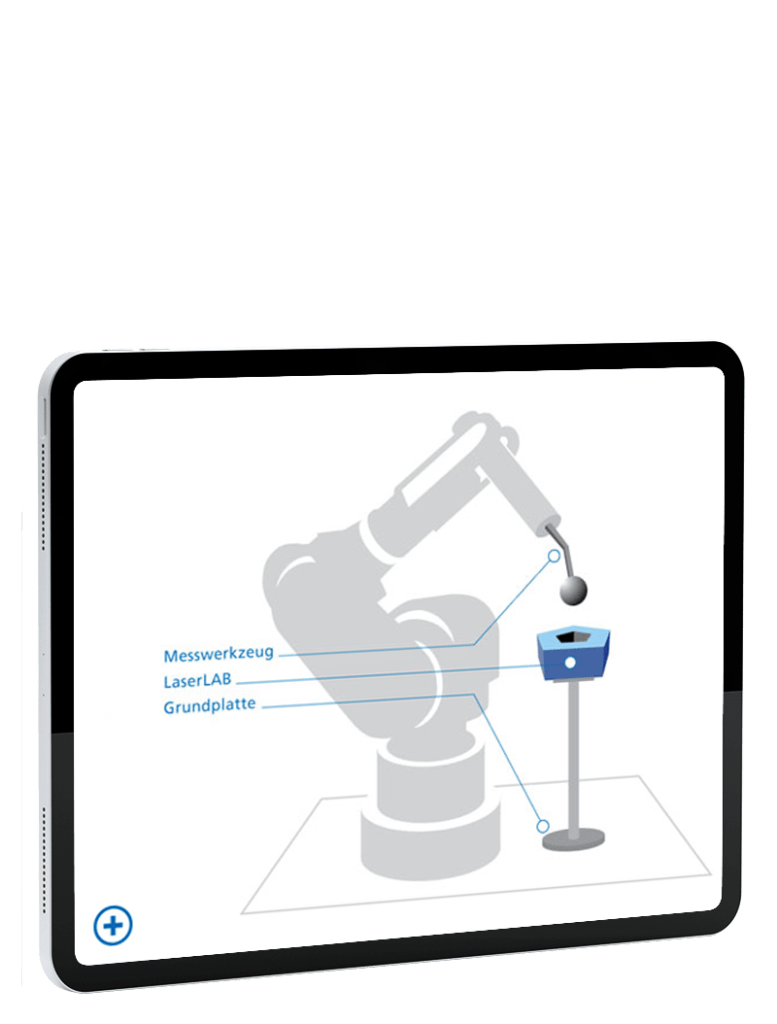
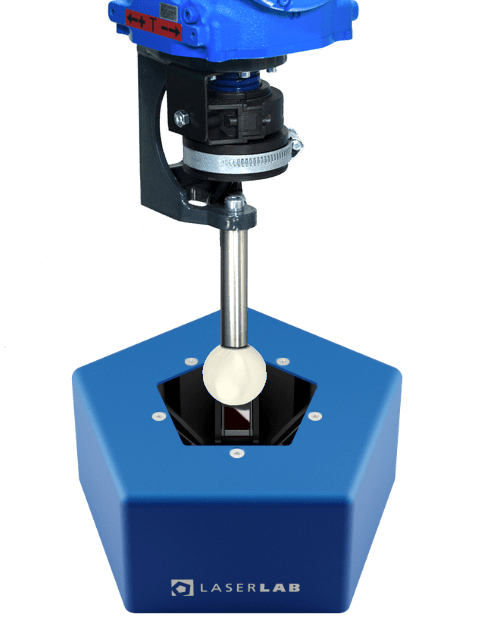
Für die Vermessung der Roboter mit loop:in wurden die Linearachsen mit berücksichtigt. Die Linearachse wird verfahren, während der Roboter seinen TCP im LaserLAB hält. Das Ergebnis der Kalibrierung liefert unter anderem auch den Montagefehler des Roboters auf der Linearachse.
Produkte
Diese Wiest Produkte wurden verwendet:
loop:in
Kalibrieren Sie Ihren Roboter
für höchste Präzision